Franco Caspe - Andrew McPherson - Mark Sandler
Queen Mary University of London - Centre for Digital Music
Paper - Code - Presentation Video
Abstract
FM Synthesis is a well-known algorithm used to generate complex timbre from a compact set of design primitives. Typically featuring a MIDI interface, it is usually impractical to control it from an audio source. On the other hand, Differentiable Digital Signal Processing (DDSP) has enabled nuanced audio rendering by Deep Neural Networks (DNNs) that learn to control differentiable synthesis layers from arbitrary sound inputs. The training process involves a corpus of audio for supervision, and spectral reconstruction loss functions. Such functions, while being great to match spectral amplitudes, present a lack of pitch direction which can hinder the joint optimization of the parameters of FM synthesizers. In this paper, we take steps towards enabling continuous control of a well-established FM synthesis architecture from an audio input. Firstly, we discuss a set of design constraints that ease spectral optimization of a differentiable FM synthesizer via a standard reconstruction loss. Next, we present Differentiable DX7 (DDX7), a lightweight architecture for neural FM resynthesis of musical instrument sounds in terms of a compact set of parameters. We train the model on instrument samples extracted from the URMP dataset, and quantitatively demonstrate its comparable audio quality against selected benchmarks.
Architecture
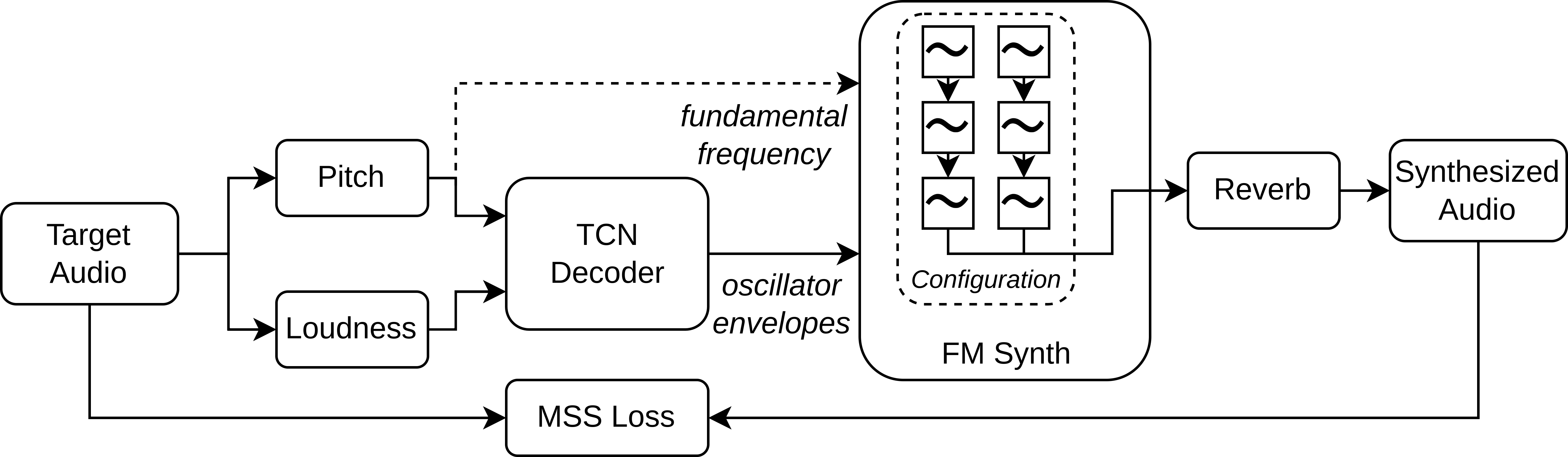
Continuous Control of an FM Synthesizer
We show resynthesis results on unseen data for the best scored DDX7 models according to the Frechet Audio Distance[1]. We compare the results with the Harmonic plus Noise (HpN) baseline model (a Pytorch implementation of the DDSP Decoder[2]), and the original recordings extracted from the URMP[3] dataset.
| Violin |
|
|
6 Oscillators. Imax = 2 |
| Flute |
|
|
6 Oscillators. Imax = 2 |
| Trumpet |
|
|
2 Oscillators. Imax = 2π |
Intervenable Synthesis Process
FM is a well-known synthesis architecture that features a compact set of sound design parameters. Once DDX7 is trained, such parameters can be modified on-the-fly to alter the model’s output. Here we present a set of simple and temporally static transformations as a proof of concept. We leave for future work a thorough exploration of these affordances.
|
Violin 6 oscillators. Imax = 2 |
ratios of value 1. |
||
|
Flute 6 oscillators. Imax = 2 |
envelope amplitudes. |
||
|
Trumpet 2 oscillators. Imax = 2π |
changed to √2. |
Hyperparameters
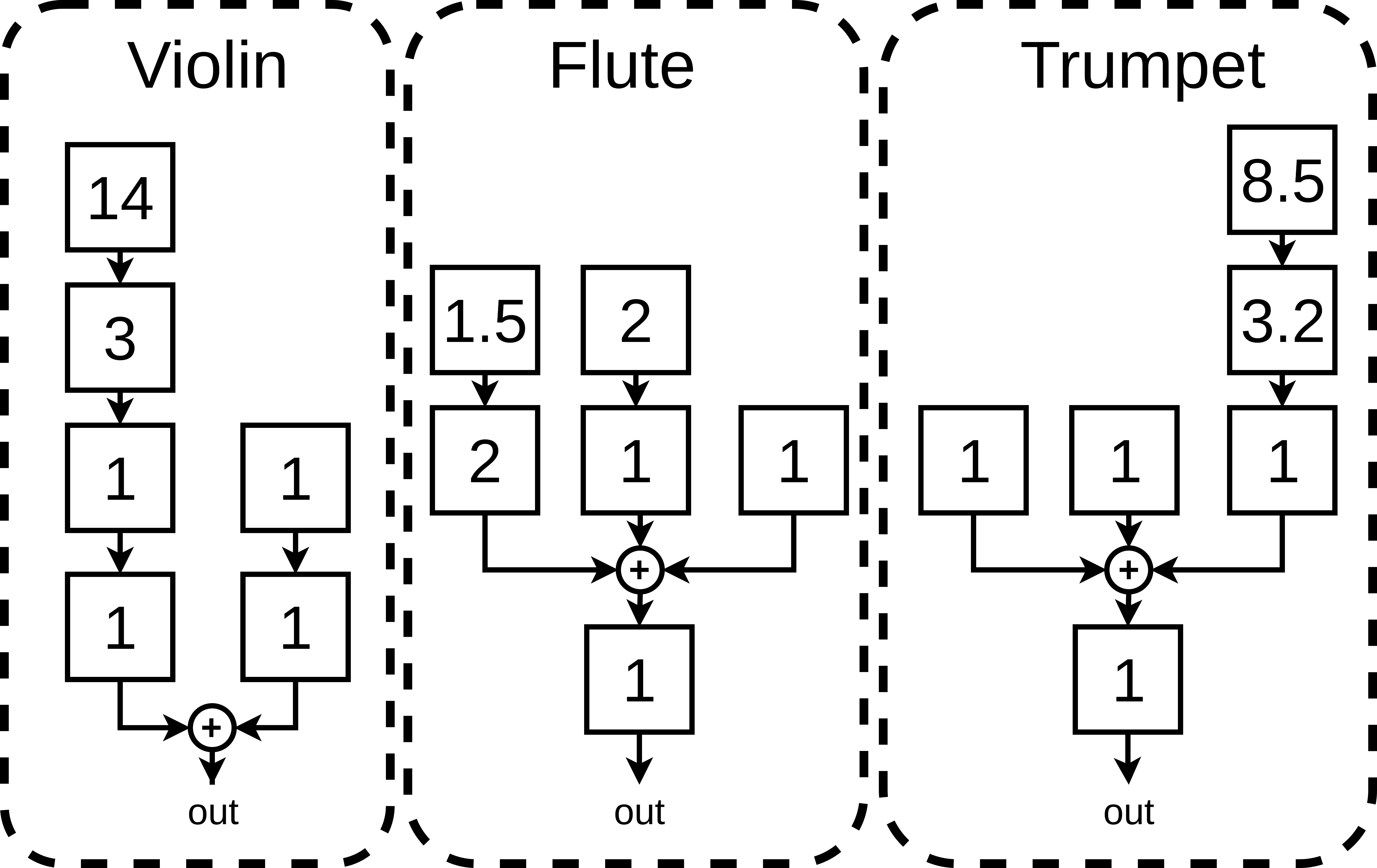
In DDX7, the maximum modulation index that the oscillators can take (Imax), and the FM configuration that is selected in the differentiable synthesizer, are important hyperparameters that have an impact on the convergence of the model. We present resynthesis audio excerpts generated during the two evaluations we conducted to assess their agency on the final results.
6-oscillator configurations
Maximum Modulation Index Test
We observe that Imax is an important hyperparameter for DDX7. A wrong selection may hinder model convergence, with results sounding unnatural, and the optimization process failing at the estimation of the room response. We leave further analysis of the impact of Imax and the Learnable Reverb on the training process for future work.
| Original | |||
| HpN Baseline | |||
| DDX7 6 osc. Imax=2 |
|||
| DDX7 6 osc. Imax=2π |
|||
| DDX7 6 osc. Imax=4π |
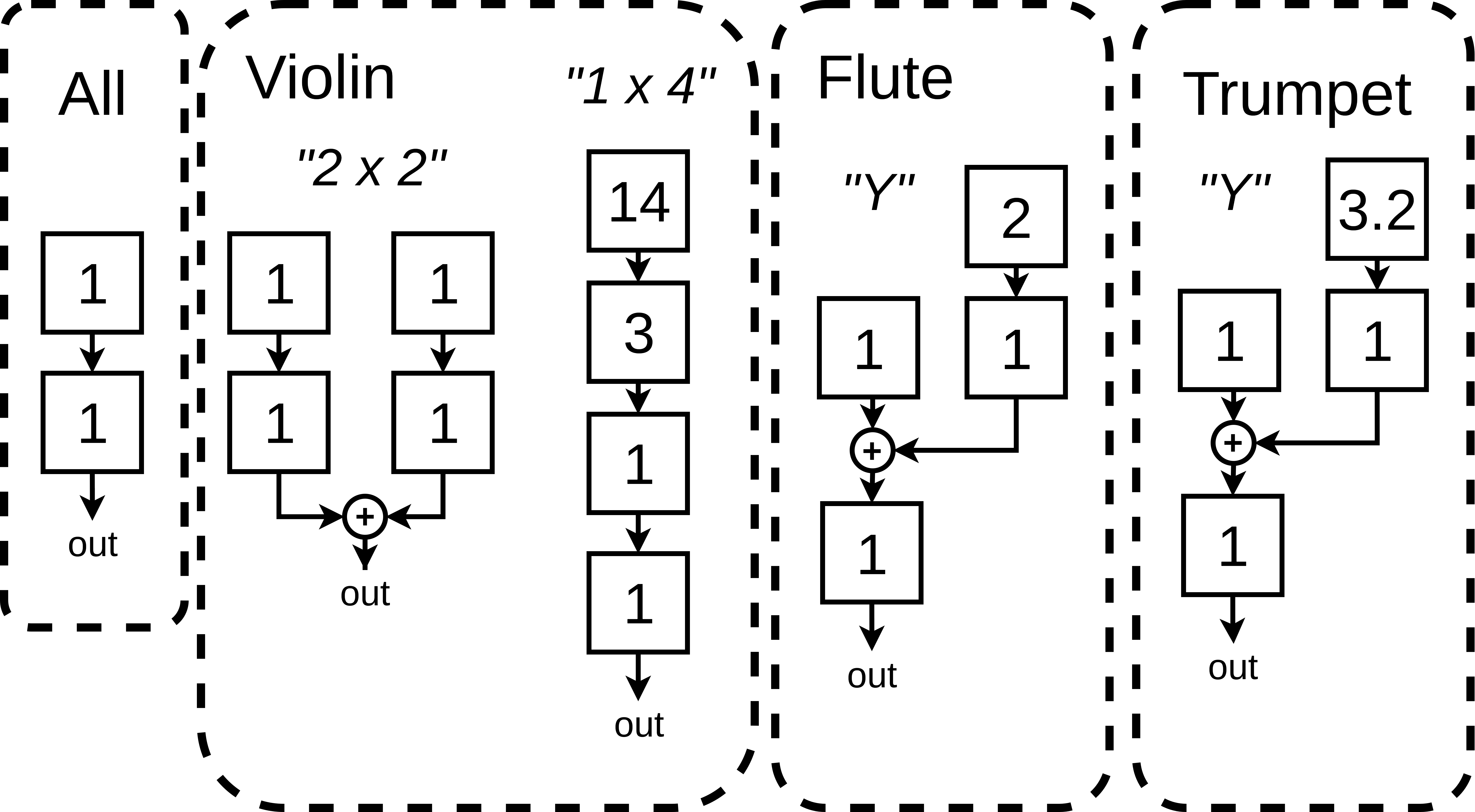
Oscillator Ablation Test
For Violin and Flute, we observe that the models benefit from the extra degrees of freedom present with more oscillators. Surprisingly, for Trumpet, we achieve the best results with a simple 2-oscillator FM configuration, even outperforming the baseline, which suggests that good results can be obtained even with very simple configurations.
| Flute Imax=2 |
|||||
| Violin Imax=2 |
|||||
| Trumpet Imax=2π |
Real-time Factor test
Due to lack of space in the paper, we left out a comparison of the real-time factor between our DDX7 model (400k parameters) and the HpN Baseline (4.5 M parameters). We execute on Pytorch the inference of audio excerpts of different length (to accomodate for different latencies) for both our model and the baseline on a laptop CPU ( Intel i7-6700HQ ). We render the audio excerpts a hundred times and extract the Real-time Factor according to the following formula, extracting the mean and standard deviation of the runs.
rt_factor = time_to_compute / length_of_audio_generated
An algorithm that can operate on real-time has to have a real time factor smaller than 1. The results shown in Table 1 indicate that DDX7 can run with as little as 32 ms of latency in real time on a laptop CPU, but the HpN Baseline needs at least 128 ms. These metrics can be improved further for both models if a different framework is used (for instance, TorchScript).
| Real Time Factor | ||
|---|---|---|
| Latency (ms) | DDX7 | HpN Baseline |
| 256 | 0.079 (0.005) | 0.231 (0.0124) |
| 128 | 0.158 (0.011) | 0.466 (0.0229) |
| 64 | 0.343 (0.039) | 1.04 (0.192) |
| 32 | 0.637 (0.042) | 1.88 (0.111) |
| 16 | 1.31 (0.169) | 3.71 (0.188) |
| 8 | 2.51 (0.161) | 7.39 (0.32) |
| 4 | 5.01 (0.215) | 15.2 (1.19) |
References
- K. Kilgour, M. Zuluaga, D. Roblek, and M. Sharifi, “Fréchet Audio Distance: A Reference-Free Metric for Evaluating Music Enhancement Algorithms,” in Interspeech 2019. ISCA, Sep. 2019, pp. 2350–2354.
- B. Li, X. Liu, K. Dinesh, Z. Duan, and G. Sharma, “Creating a Multitrack Classical Music Performance Dataset for Multimodal Music Analysis: Challenges, Insights, and Applications,” IEEE Transactions on Multimedia, vol. 21, no. 2, pp. 522–535, Feb. 2019.
- J. Engel, L. H. Hantrakul, C. Gu, and A. Roberts, “DDSP: Differentiable Digital Signal Processing,” in 8th International Conference on Learning Representations, Addis Ababa, Ethiopia, 2020.